
Experts are continually discovering new ways to use 3D printing, which has significant implications for many industries.
Silicone is of particular interest. It’s extremely versatile and can be used to create soft robotics – like the world’s first fully autonomous soft-bodied robot. However, silicone 3D printing was always considered an impossibility – until now.
Students from Delft University of Technology in the Netherlands have discovered a way to 3D print with silicone, using a 3D printed shell. The team has called the new method, which was exhibited last year at the Advanced Prototyping Science Fair at the Industrial Design Engineering Faculty, UltiCast.
It blends 3D printing with traditional casting methods – using a modified Ultimaker 2+ printer to simultaneously 3D print a plastic mould, then fill the mould with a two-component silicone mix.
How does it work?
In ideal circumstances, the team firstly designs a geometry with a predefined internal cavity – which allows for the ‘soft robotics actuation’. This deforms the material when subjected to air pressure.
After this, the design is loaded to the slicer tool, with the PVA printing interruptions defined at set heights. The nozzle is primed at a set location, retracting the silicone so it doesn’t spill when moving to the printed PVA mould.
It fills the mould with a calculated volume of silicone, before retreating to allow the PVA mould to be built further.
Challenges
The technology wasn’t without its challenges. The biggest obstacle the team faced was being able to integrate as many features into the slicer as possible, whilst still being able to print at just the single touch of a button. To resolve this, the team created a specialized code – which automatically slices the 3D printed mould and determines how much silicone is required to fill it.
Another problem was removing the mould after the casting was complete. By using PVA, which is water soluble, they could easily extract the silicone by dissolving the mould in water.
To achieve this, they used an Ultimaker 3D printer, which they hacked and rebuilt almost entirely.
Big implications
This remarkable innovation has big implications. Ulticasting makes it possible to print a soft actuator much more quickly, and with more design freedom than traditional casting methods.
It’s also versatile. Hard and soft materials can be mixed in a single print. For example, in a recent experiment, the team successfully managed to print a hard skeleton inside soft silicone.
“3D printing offers a variety of applications, soft robotics being one of them,” says coordinator Jouke Verlinden. “It allows you to make things that are impossible with traditional robotics.”
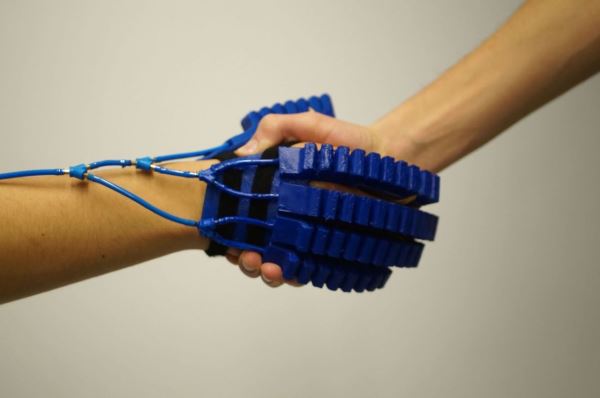
It allows for the rapid, low-cost development of customized soft robotic grippers and orthotics – which are of tremendous value to the medical industry. By being able to create structures with both rigid and flexible components, users can create complex, anisotropic behaviors in soft robotics, and can integrate actuators and sensors.
Rob Scharff, a member of the Ulticast team, adds: “You get a lot of freedom to personalize the behaviour of robots with geometry and materials.”
This means being able to make flexible robot limbs and custom-designed grippers, medical aids that could help those suffering from debilitating conditions such as localized paralysis, arthritis or related injuries.
Ultimaker 3D printers are available in Australia from Imaginables.
